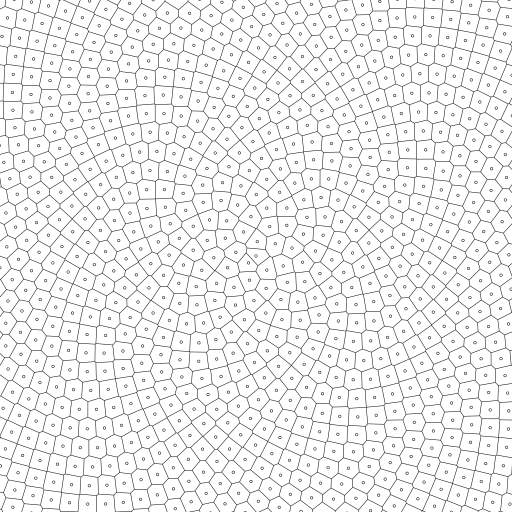
Voronoi Spiral
A spiral of points is created. Each i^th point is rotated by an angle i*2*PI*Ratio around the origin. The initial value of the Ratio is 0.38196601125 (which gives the "golden angle"). You can change the Ratio using the slider below. A better explanation about what's going on can find here: youtu.be/sj8sg8qnjog.
The final Voronoi diagram is based on the Delaunay triangulation of the points, using delaunator of Mapbox: github.com/mapbox/delaunator
#Delaunay #triangulation #voronoi
Log in to post a comment.
// Voronoi Spiral. Created by Reinder Nijhoff 2019
// @reindernijhoff
//
// https://turtletoy.net/turtle/70b4fd8c25
//
Canvas.setpenopacity(1);
const canvas_size = 45;
const coords = [];
let delaunay;
const turtle = new Turtle();
function walk(i) {
if (i == 0) {
for (let j=0; j<6000; j++) {
const Ratio = 0.38196601125; // min=0.01, max=1, step=0.001
const r = 4 * Math.sqrt(j);
const a = j * 2 * Math.PI * Ratio;
const x = Math.cos(a)*r;
const y = Math.sin(a)*r;
// const x = (Math.random()**2*2-1) * canvas_size;
// const y = (Math.random()**2*2-1) * canvas_size;
coords.push([x,y]);
}
delaunay = Delaunator.from(coords);
}
const t0i = i;
const t0 = (t0i/3|0) * 3;
const t1i = delaunay.halfedges[i];
const t = delaunay.triangles;
const c = delaunay.coords;
if (t1i >= t0i) {
const t1 = (t1i/3|0) * 3;
const p0 = circumcenter(c[t[t0+0]*2+0], c[t[t0+0]*2+1], c[t[t0+1]*2+0], c[t[t0+1]*2+1], c[t[t0+2]*2+0], c[t[t0+2]*2+1]);
const p1 = circumcenter(c[t[t1+0]*2+0], c[t[t1+0]*2+1], c[t[t1+1]*2+0], c[t[t1+1]*2+1], c[t[t1+2]*2+0], c[t[t1+2]*2+1]);
turtle.jump(p0.x, p0.y);
turtle.goto(p1.x, p1.y);
} else if (t1i < 0) {
const p0 = circumcenter(c[t[t0+0]*2+0], c[t[t0+0]*2+1], c[t[t0+1]*2+0], c[t[t0+1]*2+1], c[t[t0+2]*2+0], c[t[t0+2]*2+1]);
const v0 = [c[t[t0+(t0i % 3)]*2+0], c[t[t0+(t0i % 3)]*2+1]];
const v1 = [c[t[t0+((t0i + 1) % 3)]*2+0], c[t[t0+((t0i + 1) % 3)]*2+1]];
const d = [(v0[1]-v1[1]), -(v0[0]-v1[0])];
const l = Math.sqrt(d[0]**2 + d[1]**2);
turtle.jump(p0.x, p0.y);
turtle.goto(p0.x + 200*d[0]/l, p0.y + 200*d[1]/l);
}
if (i < coords.length) {
turtle.jump(coords[i][0], coords[i][1]-.5);
turtle.circle(.5);
}
return i < delaunay.halfedges.length - 1;
}
//
// https://github.com/mapbox/delaunator
//
// ISC License
//
// Copyright (c) 2017, Mapbox
//
// Permission to use, copy, modify, and/or distribute this software for any purpose
// with or without fee is hereby granted, provided that the above copyright notice
// and this permission notice appear in all copies.
//
// THE SOFTWARE IS PROVIDED "AS IS" AND THE AUTHOR DISCLAIMS ALL WARRANTIES WITH
// REGARD TO THIS SOFTWARE INCLUDING ALL IMPLIED WARRANTIES OF MERCHANTABILITY AND
// FITNESS. IN NO EVENT SHALL THE AUTHOR BE LIABLE FOR ANY SPECIAL, DIRECT,
// INDIRECT, OR CONSEQUENTIAL DAMAGES OR ANY DAMAGES WHATSOEVER RESULTING FROM LOSS
// OF USE, DATA OR PROFITS, WHETHER IN AN ACTION OF CONTRACT, NEGLIGENCE OR OTHER
// TORTIOUS ACTION, ARISING OUT OF OR IN CONNECTION WITH THE USE OR PERFORMANCE OF
// THIS SOFTWARE.
//
const EPSILON = Math.pow(2, -52);
const EDGE_STACK = new Uint32Array(512);
class Delaunator {
static from(points, getX = defaultGetX, getY = defaultGetY) {
const n = points.length;
const coords = new Float64Array(n * 2);
for (let i = 0; i < n; i++) {
const p = points[i];
coords[2 * i] = getX(p);
coords[2 * i + 1] = getY(p);
}
return new Delaunator(coords);
}
constructor(coords) {
const n = coords.length >> 1;
if (n > 0 && typeof coords[0] !== 'number') throw new Error('Expected coords to contain numbers.');
this.coords = coords;
// arrays that will store the triangulation graph
const maxTriangles = 2 * n - 5;
const triangles = this.triangles = new Uint32Array(maxTriangles * 3);
const halfedges = this.halfedges = new Int32Array(maxTriangles * 3);
// temporary arrays for tracking the edges of the advancing convex hull
this._hashSize = Math.ceil(Math.sqrt(n));
const hullPrev = this.hullPrev = new Uint32Array(n); // edge to prev edge
const hullNext = this.hullNext = new Uint32Array(n); // edge to next edge
const hullTri = this.hullTri = new Uint32Array(n); // edge to adjacent triangle
const hullHash = new Int32Array(this._hashSize).fill(-1); // angular edge hash
// populate an array of point indices; calculate input data bbox
const ids = new Uint32Array(n);
let minX = Infinity;
let minY = Infinity;
let maxX = -Infinity;
let maxY = -Infinity;
for (let i = 0; i < n; i++) {
const x = coords[2 * i];
const y = coords[2 * i + 1];
if (x < minX) minX = x;
if (y < minY) minY = y;
if (x > maxX) maxX = x;
if (y > maxY) maxY = y;
ids[i] = i;
}
const cx = (minX + maxX) / 2;
const cy = (minY + maxY) / 2;
let minDist = Infinity;
let i0, i1, i2;
// pick a seed point close to the center
for (let i = 0; i < n; i++) {
const d = dist(cx, cy, coords[2 * i], coords[2 * i + 1]);
if (d < minDist) {
i0 = i;
minDist = d;
}
}
const i0x = coords[2 * i0];
const i0y = coords[2 * i0 + 1];
minDist = Infinity;
// find the point closest to the seed
for (let i = 0; i < n; i++) {
if (i === i0) continue;
const d = dist(i0x, i0y, coords[2 * i], coords[2 * i + 1]);
if (d < minDist && d > 0) {
i1 = i;
minDist = d;
}
}
let i1x = coords[2 * i1];
let i1y = coords[2 * i1 + 1];
let minRadius = Infinity;
// find the third point which forms the smallest circumcircle with the first two
for (let i = 0; i < n; i++) {
if (i === i0 || i === i1) continue;
const r = circumradius(i0x, i0y, i1x, i1y, coords[2 * i], coords[2 * i + 1]);
if (r < minRadius) {
i2 = i;
minRadius = r;
}
}
let i2x = coords[2 * i2];
let i2y = coords[2 * i2 + 1];
if (minRadius === Infinity) {
throw new Error('No Delaunay triangulation exists for this input.');
}
// swap the order of the seed points for counter-clockwise orientation
if (orient(i0x, i0y, i1x, i1y, i2x, i2y)) {
const i = i1;
const x = i1x;
const y = i1y;
i1 = i2;
i1x = i2x;
i1y = i2y;
i2 = i;
i2x = x;
i2y = y;
}
const center = circumcenter(i0x, i0y, i1x, i1y, i2x, i2y);
this._cx = center.x;
this._cy = center.y;
const dists = new Float64Array(n);
for (let i = 0; i < n; i++) {
dists[i] = dist(coords[2 * i], coords[2 * i + 1], center.x, center.y);
}
// sort the points by distance from the seed triangle circumcenter
quicksort(ids, dists, 0, n - 1);
// set up the seed triangle as the starting hull
this.hullStart = i0;
let hullSize = 3;
hullNext[i0] = hullPrev[i2] = i1;
hullNext[i1] = hullPrev[i0] = i2;
hullNext[i2] = hullPrev[i1] = i0;
hullTri[i0] = 0;
hullTri[i1] = 1;
hullTri[i2] = 2;
hullHash[this._hashKey(i0x, i0y)] = i0;
hullHash[this._hashKey(i1x, i1y)] = i1;
hullHash[this._hashKey(i2x, i2y)] = i2;
this.trianglesLen = 0;
this._addTriangle(i0, i1, i2, -1, -1, -1);
for (let k = 0, xp, yp; k < ids.length; k++) {
const i = ids[k];
const x = coords[2 * i];
const y = coords[2 * i + 1];
// skip near-duplicate points
if (k > 0 && Math.abs(x - xp) <= EPSILON && Math.abs(y - yp) <= EPSILON) continue;
xp = x;
yp = y;
// skip seed triangle points
if (i === i0 || i === i1 || i === i2) continue;
// find a visible edge on the convex hull using edge hash
let start = 0;
for (let j = 0, key = this._hashKey(x, y); j < this._hashSize; j++) {
start = hullHash[(key + j) % this._hashSize];
if (start !== -1 && start !== hullNext[start]) break;
}
start = hullPrev[start];
let e = start, q;
while (q = hullNext[e], !orient(x, y, coords[2 * e], coords[2 * e + 1], coords[2 * q], coords[2 * q + 1])) {
e = q;
if (e === start) {
e = -1;
break;
}
}
if (e === -1) continue; // likely a near-duplicate point; skip it
// add the first triangle from the point
let t = this._addTriangle(e, i, hullNext[e], -1, -1, hullTri[e]);
// recursively flip triangles from the point until they satisfy the Delaunay condition
hullTri[i] = this._legalize(t + 2);
hullTri[e] = t; // keep track of boundary triangles on the hull
hullSize++;
// walk forward through the hull, adding more triangles and flipping recursively
let n = hullNext[e];
while (q = hullNext[n], orient(x, y, coords[2 * n], coords[2 * n + 1], coords[2 * q], coords[2 * q + 1])) {
t = this._addTriangle(n, i, q, hullTri[i], -1, hullTri[n]);
hullTri[i] = this._legalize(t + 2);
hullNext[n] = n; // mark as removed
hullSize--;
n = q;
}
// walk backward from the other side, adding more triangles and flipping
if (e === start) {
while (q = hullPrev[e], orient(x, y, coords[2 * q], coords[2 * q + 1], coords[2 * e], coords[2 * e + 1])) {
t = this._addTriangle(q, i, e, -1, hullTri[e], hullTri[q]);
this._legalize(t + 2);
hullTri[q] = t;
hullNext[e] = e; // mark as removed
hullSize--;
e = q;
}
}
// update the hull indices
this.hullStart = hullPrev[i] = e;
hullNext[e] = hullPrev[n] = i;
hullNext[i] = n;
// save the two new edges in the hash table
hullHash[this._hashKey(x, y)] = i;
hullHash[this._hashKey(coords[2 * e], coords[2 * e + 1])] = e;
}
this.hull = new Uint32Array(hullSize);
for (let i = 0, e = this.hullStart; i < hullSize; i++) {
this.hull[i] = e;
e = hullNext[e];
}
this.hullPrev = this.hullNext = this.hullTri = null; // get rid of temporary arrays
// trim typed triangle mesh arrays
this.triangles = triangles.subarray(0, this.trianglesLen);
this.halfedges = halfedges.subarray(0, this.trianglesLen);
}
_hashKey(x, y) {
return Math.floor(pseudoAngle(x - this._cx, y - this._cy) * this._hashSize) % this._hashSize;
}
_legalize(a) {
const {triangles, coords, halfedges} = this;
let i = 0;
let ar = 0;
// recursion eliminated with a fixed-size stack
while (true) {
const b = halfedges[a];
/* if the pair of triangles doesn't satisfy the Delaunay condition
* (p1 is inside the circumcircle of [p0, pl, pr]), flip them,
* then do the same check/flip recursively for the new pair of triangles
*
* pl pl
* /||\ / \
* al/ || \bl al/ \a
* / || \ / \
* / a||b \ flip /___ar___\
* p0\ || /p1 => p0\---bl---/p1
* \ || / \ /
* ar\ || /br b\ /br
* \||/ \ /
* pr pr
*/
const a0 = a - a % 3;
ar = a0 + (a + 2) % 3;
if (b === -1) { // convex hull edge
if (i === 0) break;
a = EDGE_STACK[--i];
continue;
}
const b0 = b - b % 3;
const al = a0 + (a + 1) % 3;
const bl = b0 + (b + 2) % 3;
const p0 = triangles[ar];
const pr = triangles[a];
const pl = triangles[al];
const p1 = triangles[bl];
const illegal = inCircle(
coords[2 * p0], coords[2 * p0 + 1],
coords[2 * pr], coords[2 * pr + 1],
coords[2 * pl], coords[2 * pl + 1],
coords[2 * p1], coords[2 * p1 + 1]);
if (illegal) {
triangles[a] = p1;
triangles[b] = p0;
const hbl = halfedges[bl];
// edge swapped on the other side of the hull (rare); fix the halfedge reference
if (hbl === -1) {
let e = this.hullStart;
do {
if (this.hullTri[e] === bl) {
this.hullTri[e] = a;
break;
}
e = this.hullNext[e];
} while (e !== this.hullStart);
}
this._link(a, hbl);
this._link(b, halfedges[ar]);
this._link(ar, bl);
const br = b0 + (b + 1) % 3;
// don't worry about hitting the cap: it can only happen on extremely degenerate input
if (i < EDGE_STACK.length) {
EDGE_STACK[i++] = br;
}
} else {
if (i === 0) break;
a = EDGE_STACK[--i];
}
}
return ar;
}
_link(a, b) {
this.halfedges[a] = b;
if (b !== -1) this.halfedges[b] = a;
}
// add a new triangle given vertex indices and adjacent half-edge ids
_addTriangle(i0, i1, i2, a, b, c) {
const t = this.trianglesLen;
this.triangles[t] = i0;
this.triangles[t + 1] = i1;
this.triangles[t + 2] = i2;
this._link(t, a);
this._link(t + 1, b);
this._link(t + 2, c);
this.trianglesLen += 3;
return t;
}
}
// monotonically increases with real angle, but doesn't need expensive trigonometry
function pseudoAngle(dx, dy) {
const p = dx / (Math.abs(dx) + Math.abs(dy));
return (dy > 0 ? 3 - p : 1 + p) / 4; // [0..1]
}
function dist(ax, ay, bx, by) {
const dx = ax - bx;
const dy = ay - by;
return dx * dx + dy * dy;
}
function orient(px, py, qx, qy, rx, ry) {
return (qy - py) * (rx - qx) - (qx - px) * (ry - qy) < 0;
}
function inCircle(ax, ay, bx, by, cx, cy, px, py) {
const dx = ax - px;
const dy = ay - py;
const ex = bx - px;
const ey = by - py;
const fx = cx - px;
const fy = cy - py;
const ap = dx * dx + dy * dy;
const bp = ex * ex + ey * ey;
const cp = fx * fx + fy * fy;
return dx * (ey * cp - bp * fy) -
dy * (ex * cp - bp * fx) +
ap * (ex * fy - ey * fx) < 0;
}
function circumradius(ax, ay, bx, by, cx, cy) {
const dx = bx - ax;
const dy = by - ay;
const ex = cx - ax;
const ey = cy - ay;
const bl = dx * dx + dy * dy;
const cl = ex * ex + ey * ey;
const d = 0.5 / (dx * ey - dy * ex);
const x = (ey * bl - dy * cl) * d;
const y = (dx * cl - ex * bl) * d;
return x * x + y * y;
}
function circumcenter(ax, ay, bx, by, cx, cy) {
const dx = bx - ax;
const dy = by - ay;
const ex = cx - ax;
const ey = cy - ay;
const bl = dx * dx + dy * dy;
const cl = ex * ex + ey * ey;
const d = 0.5 / (dx * ey - dy * ex);
const x = ax + (ey * bl - dy * cl) * d;
const y = ay + (dx * cl - ex * bl) * d;
return {x, y};
}
function quicksort(ids, dists, left, right) {
if (right - left <= 20) {
for (let i = left + 1; i <= right; i++) {
const temp = ids[i];
const tempDist = dists[temp];
let j = i - 1;
while (j >= left && dists[ids[j]] > tempDist) ids[j + 1] = ids[j--];
ids[j + 1] = temp;
}
} else {
const median = (left + right) >> 1;
let i = left + 1;
let j = right;
swap(ids, median, i);
if (dists[ids[left]] > dists[ids[right]]) swap(ids, left, right);
if (dists[ids[i]] > dists[ids[right]]) swap(ids, i, right);
if (dists[ids[left]] > dists[ids[i]]) swap(ids, left, i);
const temp = ids[i];
const tempDist = dists[temp];
while (true) {
do i++; while (dists[ids[i]] < tempDist);
do j--; while (dists[ids[j]] > tempDist);
if (j < i) break;
swap(ids, i, j);
}
ids[left + 1] = ids[j];
ids[j] = temp;
if (right - i + 1 >= j - left) {
quicksort(ids, dists, i, right);
quicksort(ids, dists, left, j - 1);
} else {
quicksort(ids, dists, left, j - 1);
quicksort(ids, dists, i, right);
}
}
}
function swap(arr, i, j) {
const tmp = arr[i];
arr[i] = arr[j];
arr[j] = tmp;
}
function defaultGetX(p) {
return p[0];
}
function defaultGetY(p) {
return p[1];
}